Basler Robotics Application Software
Precise 3D vision software for robot applications
The plug and play software modules are suitable for typical robotics applications, such as object recognition, picking tasks, and navigation. You can select the exact modules that suit your requirements and easily combine them with our stereo cameras. Thanks to standardized software interfaces, they can be easily integrated into your robot environment.
Plug and play
Easy-to-activate application modules and software interfaces for robot integrationFor typical robotics applications
Application-specific modules for typical robotics tasks, providing efficient automation and precise controlWeb-based user interface
Intuitive, web-based configuration of the modules and real-time preview of the detected objects with the respective gripping pointsReduced system costs
Individually selectable modules, instead of a complete package, avoid unnecessary costs
Software for typical robotics applications
Whether you need to optimize sorting and picking processes or perform measurement checks for optimum robot control: our vision solutions offer a wide range of possible uses for your robot application.





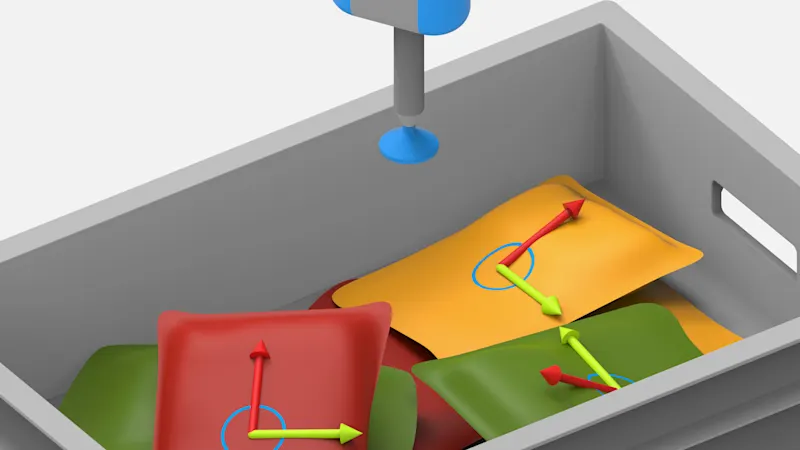
Pick-and-place robot control: software modules and 3D cameras as a dream team
Our powerful 3D software modules combined with precise Basler Stereo Cameras enable reliable pick-and-place applications - even in complex environments. We offer a flexible solution for a wide range of applications - from "reaching into a box" to precise positioning on conveyor belts. Robust object detection, depth information with up to < 1 mm accuracy, and simple integration into existing automation systems make it possible.
To the stereo camera modelsRobot integration

We offer various solutions so that you can easily use our 3D cameras and software modules with your preferred robots. Thanks to software interfaces, our products are compatible with robots from ABB, Fanuc, KUKA, Universal Robots, Yaskawa, Techman Robot, fruitcore robotics and Franka Robotics.
Is your robot not listed? We will find a way to support you!
Contact usSoftware modules for robotics tasks
Tailored to typical robotics applications, the 3D Application Software Suite includes six modules for tasks such as: object recognition and identification, picking, navigation, and CAD matching. Individual modules are designed to address the unique requirements of each of these tasks. The software modules are compatible with all Basler Stereo Camera models. When combined with the Basler Cube, the Basler 3D ItemPick and Basler 3D BoxPick modules can also be used with the Basler ToF Camera. Select the right module(s) for your robotics solution from the software suite and keep your overall system costs low.
Additional information on the Application Software for Robotics
Learn more about our products and applications. Our comprehensive materials provide you with all the important details.