Basler Stereo Cameras
3D stereo camera for vision-guided robotics applications
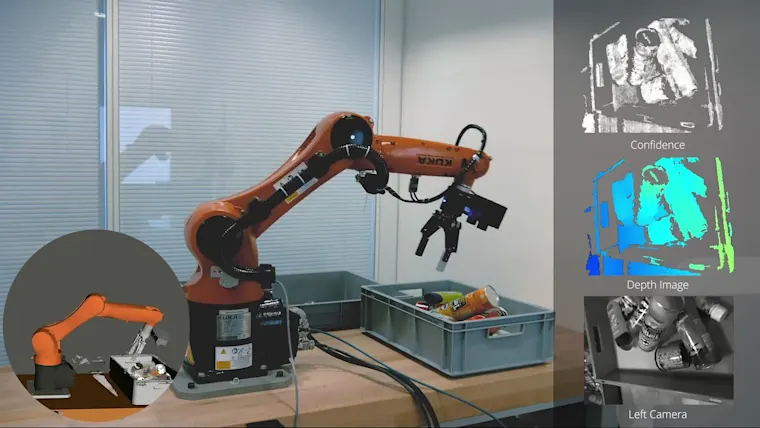
Basler stereo cameras are ideal for pick-and-place tasks for robotics, logistics & factory automation. They impress with their excellent image quality, low latency and simple setup thanks to intuitive software. Compatibility with Basler 3D application & third-party software offers many possible applications.
Plug-and-play
Easy integration thanks to onboard processing, intuitive web interface, and numerous interface optionsIndustrial grade
Rugged design engineered for high performance in demanding industrial environmentsFlexible software suite
Intelligent 3D software modules for individual image-controlled robotics applicationCost efficiency
Overall system costs are optimized thanks to a flexible hardware and software concept
Our stereo cameras
Find the right camera for your application or use our Vision System Configurator to configure your system.

Our stereo camera product families
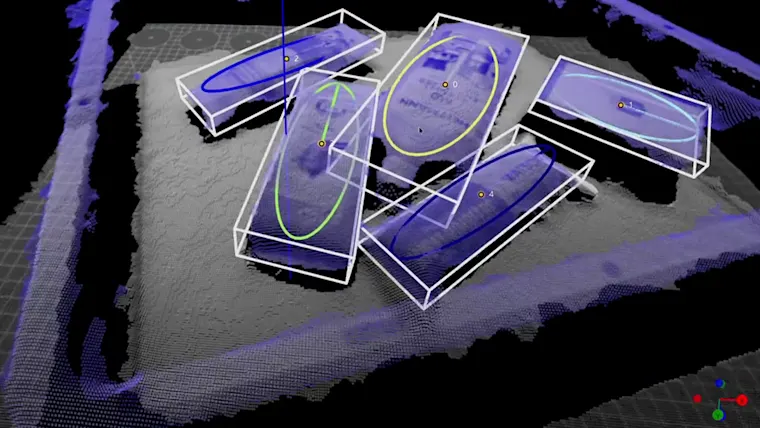
The stereo ace cameras provide high-resolution 3D image data for logistics and factory automation, even for difficult surfaces. The stereo visard cameras, on the other hand, are optimized for image-guided robotics. With pre-installed software, they are particularly well suited for object recognition applications, allowing a robot arm, for example, to grip a specific object.

Stereo mini
Compact, cost-effective stereo camera for robotics and logistics
Baselines of 50 and 95 mm for short to medium depth ranges
USB 3.0, GigE, or GMSL interfaces depending on model
Easy integration via pylon SDK and GenTL
Factory-calibrated stereo geometry for reliable depth data
Low latency for real-time applications
Small, robust housing for machine and robot integration

Stereo ace
Baselines of 100, 200 and 300 mm in color and black and white options
Quick and easy integration thanks to the pylon SDK
Extensive selection of Basler 3D application software with Basler 3D Camera Cube I or S
Factory calibration and dynamic self-calibration routines for stable stereo images in the field
Minimal latency for fast 3D image acquisition and the shortest cycle times
Customizable hardware for an ideal customer solution

Stereo visard
Baselines of 65 and 160 mm in color and black and white options
Intelligent camera solution thanks to direct onboard processing with optional projector
Extensive selection of Basler 3D application software
Minimal latency for fast 3D image acquisition and low cycle times
Easy to configure and operate thanks to user-friendly web interface
Basler Application Software for Robotics

An extensive selection of application-specific 3D software modules provides solutions for typical robotic tasks such as bin picking, machine tending, or order picking. The modules can be easily activated on the Basler stereo cameras and intuitively operated via the sensor's standard interface. Optional hardware add-ons such as projectors or lighting further optimize operation.
Application Software for RoboticsMore information about the Basler Stereo Camera
Learn more about our products and applications. Our comprehensive materials provide you with all the important details.