Basler 雙目視覺相機
影像引導機器人專用工業級 3D 雙目視覺
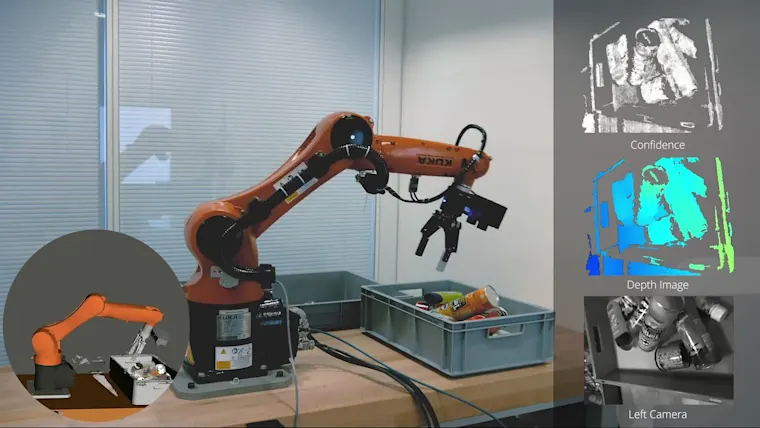
雙目視覺(Stereo Vision,亦稱為立體視覺)是一種透過兩個鏡頭模擬人眼視差來取得深度資訊的技術。 在 Basler 雙目視覺相機系列協助下,機器人可以即時感知周圍環境。此系列相機預裝了機載軟體包和配套的應用軟體,適用於典型的機器人應用,例如取放任務。
隨插即用
透過板載處理、直覺式 Web 介面和多款介面輕鬆整合工業級
堅固耐用的設計,可在要求嚴苛的工業環境中發揮高性能靈活的軟體套件
智慧 3D 軟體模組,適用於個別的影像控制機器人應用成本效益
採用模組化的軟硬體概念,使整體系統成本達到最佳化
我們的雙目視覺相機
找到適用於您應用的相機,也可以使用我們的視覺系統選配工具 來配置您的系統。
我們的雙目視覺相機產品系列
Basler 的雙目視覺相機結合先進的立體視覺演算法。stereo ace 相機為物流業與工廠自動化帶來高解析度 3D 影像資料,即使是困難表面也沒問題。另一方面,stereo visard 相機則為影像導引機器人進行最佳化。具備內建軟體,特別適用於物體辨識應用,例如可讓機器手臂抓取特定物品。

Stereo mini
精巧且具成本效益的雙目視覺相機,適用於機器人與物流應用
50 mm 與 95 mm 基線距離,適用於短距離至中距離的深度量測範圍
依機型提供 USB 3.0、GigE 或 GMSL 介面
透過 pylon SDK 與 GenTL 可輕鬆整合至系統
出廠校正的立體幾何,提供可靠的深度資料
低延遲設計,適用於即時應用
小型且堅固的機構外殼,便於機器設備與機器人整合

Stereo ace
基礎距離為 100、200 與 300 mm,具備彩色與黑白機種可選
透過 pylon SDK 快速輕鬆地進行整合
多種 Basler 3D 應用軟體可選,搭配 Basler 3D 相機 Cube I 或 S
出廠校正與動態自我校正功能,帶來穩定的現場雙目視覺影像
最短延遲時間,帶來快速 3D 影像擷取與最短周期時間
可自訂的硬體,提供理想的客戶解決方案

Stereo visard
基礎距離為 65 與 160 mm,具備彩色與黑白機種可選
智慧型相機解決方案,可直接板載處理並可選配投影機
多種 Basler 3D 應用軟體可選
最短延遲時間,帶來快速 3D 影像擷取與最短周期時間
採取易學易用的 web 介面,配置操作都簡單
Basler 機器人應用軟體

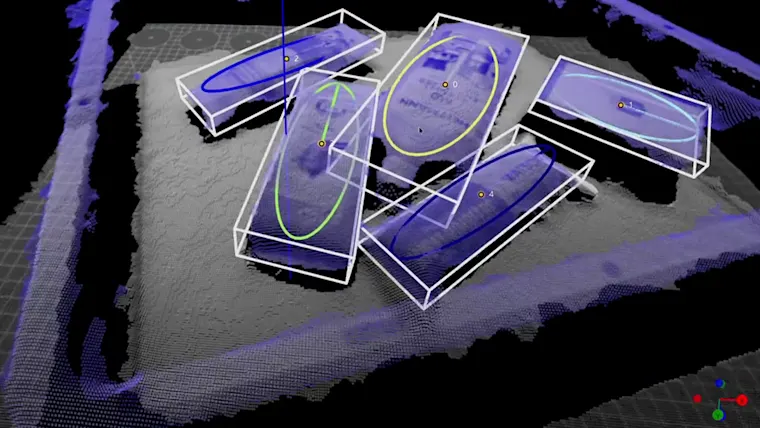
我們提供廣泛的應用專用 3D 軟體模組,提供典型的機器人任務解決方案,例如料件取放、機台管理或訂單揀選。這些模組可輕鬆地在 Basler 雙目視覺相機上啟用,並透過感光元件的標準介面進行直觀操作。選購的硬體附加元件,例如投影機或光源設備,可進一步帶來操作最佳化。
機器人應用軟體Basler 雙目視覺相機相關詳情
進一步了解我們的產品和應用。我們詳盡的資料說明所有重要細節。