ToF與立體視覺 - 它們各自的強項體現在哪裡
與2D技術相比,3D圖像處理可以為機器視覺使用者提供更多的見解。因此,藉助第三個維度,更進一步的視覺技術和應用可讓許多行業受益,尤其是工廠自動化、機器人、物流以及醫療領域。這些領域已經確立了兩種特別的3D技術:ToF (Time-of-Flight)和立體視覺,下面將對它們進行更詳細的分析和比較。
閱讀時間:約 11 分鐘

空間維度的3D視覺
在使用2D圖像處理時,它所採集的圖像必然始終是三維物體在二維度上的投影,因此2D相機無法採集到深度資訊。根據實際的視角,這可能會導致圖像中的三維物體出現不同的輪廓。但是,對於許多二維應用而言,形狀和深度資訊是無關緊要的。2D成像更常用於結構和顏色分析、零件識別、存在檢查、損壞或異常檢測、字元識別和尺寸精度檢查。這些任務的先決條件是確保提供理想的光源,以便使圖像具備足夠的對比度。
另一方面,在3D圖像中還可以獲得場景的高度資訊,就可以確定體積、形狀、距離、空間位置和物體方向,或者可以對物體進行與空間相關的存在檢查。但即使是3D成像,在使用不同的技術時,也必須考慮光源條件或表面屬性等先決條件,才能實現理想的圖像採集效果。還有在一些應用中,這兩種技術都可以使用,因此必須始終權衡它們各自的優缺點。
2D與3D視覺技術的對比
任務要求 | 查看採用 2D 感光元件的相機 | 3D |
|---|---|---|
體積和/或形狀分析 | + | - |
必須識別出結構和顏色 | + | - |
提供出色的對比度資訊 | + | - |
對比度資訊不佳或缺失 | - | + |
必須識別出高度差異 | - | + |
第三維度的定位任務/檢測 | - | + |
條碼和字元識別 | + | - |
構建部件識別 | + | + |
元件的存在檢查 | + | + |
損壞檢測 | + | + |
3D技術一覽
ToF和立體視覺具備什麼特點,各自有哪些特色,優點和缺點分別是什麼?

Time-of-Flight
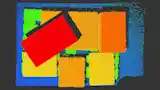
ToF是一種非常有效的技術,可用於測量距離以獲得深度數據。集成在相機中的光源可發出光脈衝照射到物體上,物體將光脈衝反射回相機。根據光脈衝所需的時間,就可以確定每個像素的距離,從而得出深度值。因此,被檢測物體的3D值會以範圍圖或點雲的形式輸出為一張空間圖像。ToF方法還能為每個圖元以灰度值的形式提供2D強度圖像,以及可表示單個值置信度的置信度圖。
使用ToF進行3D採集時,不需要使用對比度或者角落和邊緣等特定功能。採集過程也基本不受物體的強度和顏色的影響,因此可以輕鬆使用圖像處理技術將其與背景分開。該採集過程也適用於移動的物體,每秒最多能執行900萬次距離測量,精度可達毫米級。與其他3D相機相比,ToF相機 更為經濟、精巧和簡單,可實現輕鬆安裝和集成。

但是,僅在特定環境條件下和定義的測量範圍內,相機才能提供理想的採集結果。由於採用底層的ToF測量方法,在測量物體的角落或凹形面時,發射光會進行多次反射,導致ToF方法的測量結果出現偏差。離相機太近的高反射表面會導致鏡頭中出現雜散光,從而產生偽影。而對於非常暗的表面,由於反射光太少,存在無法進行可靠測量的風險。工作距離太小也會對ToF方法造成限制,所以它總體上適用於介質測量或高精度的深度測量。

立體視覺
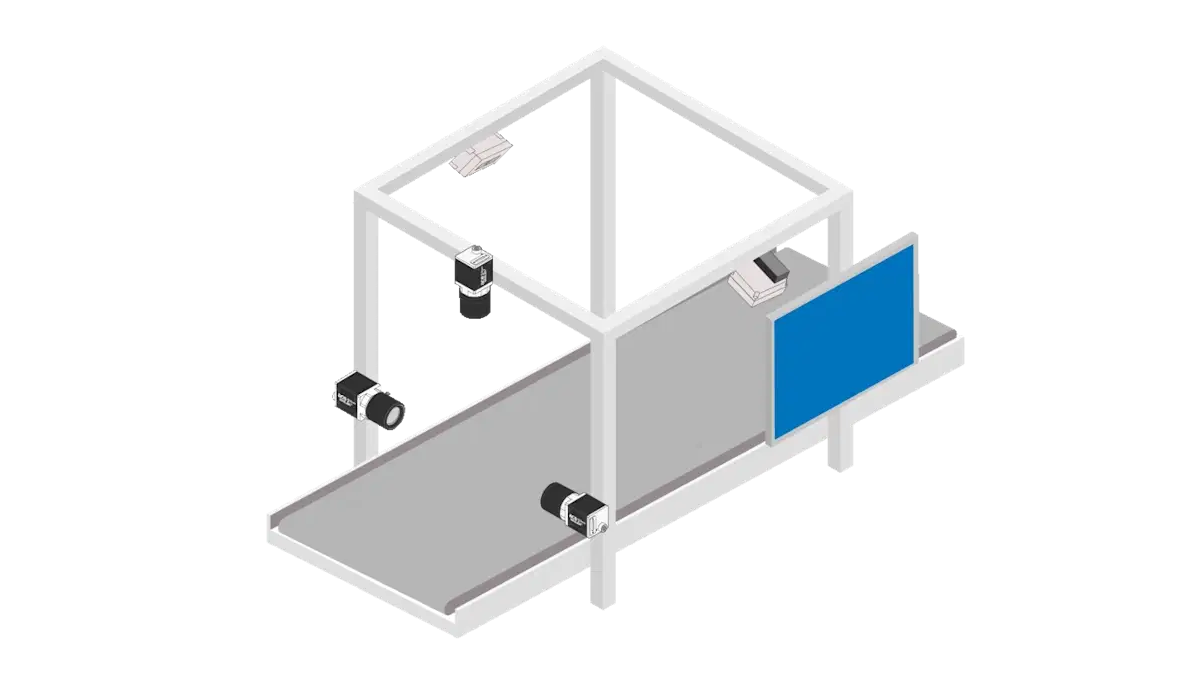
立體視覺的工作原理與人眼類似。其3D原理是使用兩台2D相機,從不同視角拍攝同步的圖像,從而獲得深度資訊。為了計算3D數據,必須知道兩台相機之間的相對位置(外部參數)。此外,還需要獲得有關每台相機的內部參數資訊,例如鏡頭的光學中心和焦距。這些資訊共同決定了特定於相機的校準值。為了計算深度資訊,首先需要校正兩個2D圖像。然後,使用適配演算法在左右圖像中搜索相應的圖元。借助校準值,就可以將場景或物體的深度圖像生成為點雲。此過程中的最佳工作距離具體取決於兩台相機的距離和設置角度,因此會各不相同。
與ToF相比,該方法不需要使用光源或鐳射束等主動發光單元,但它始終需要一定的環境光,因為從技術上講,這兩台2D相機是相互獨立的。如果其他需要使用主動發光單元的3D方法要求較為苛刻,例如當環境光較亮、測量區域重疊以及存在反射表面,那麼改用立體視覺技術可以獲得更理想的結果。
對於結構簡單的表面,立體視覺方法在兩個圖像中發現的相應特徵不足,因此無法從中計算出三維資訊。不過可以通過使用光源人工生成的表面結構來克服這些限制。為此,使用者還可以集成能夠投射隨機圖案的光線投影儀。
結構光
與立體視覺技術不同,結構光技術需要將其中一台相機替換為條紋光投影儀。它會投影具有正弦強度曲線的各種條紋狀圖案,從而在表面上創建系統已知的人造結構。在表面上投影的條紋變形可用於計算3D資訊,並獲得更準確的測量結果。
具備結構光功能的晶元在近距離內可實現較高的精度。使用結構光方法時會產生很高的計算負載,它需要逐張採集和分析多個圖像,不適用於移動的物體。因此,它僅適用於有限範圍內的即時應用,否則就需要以投入更高的成本為代價。
優點和缺點
Time-of-Flight | 立體視覺 | 結構光 | |
|---|---|---|---|
範圍 | + | o | o |
精度 | o | + | + |
弱光性能 | + | o | + |
亮光性能 | + | + | - |
均質表面 | + | - | + |
移動的物體 | o | + | - |
相機尺寸 | + | o | - |
成本 | + | o | - |
哪些應用可以從中受益
典型ToF應用
在工作距離長、測量範圍大、高速運作以及系統複雜性低的應用中,ToF技術尤其可以發揮所長,而極高的精度則不是重要的考慮因素。
測量物體(體積、形狀、位置、方向)
工廠自動化:查找、拾取、組裝物體; 檢測損壞的物體或堆垛錯誤
機器人:確定機器人的拾取點; 傳送帶上的抓取任務、箱盒取物、拾取與放置
物流:包裝、堆垛、打(拆)托盤、打標籤、自動駕駛車輛(導航、安全警告)
醫學:病人的定位和監測
立體視覺和結構光的典型應用
立體視覺技術已經可以提供較高的測量精度,並且具備結構光功能的晶元性能更勝一籌。這些類型的3D晶元適用於檢測結構較少的平扁表面,或需要實現較高測量精度的應用。
確定位置和方向
對物體進行高精度測量(體積、形狀、位置、方向)
機器人:箱盒取物、導航、防撞、裝貨和卸貨服務
物流:室內車輛導航、機器的裝卸、打(拆)托盤
戶外:測量和檢測樹幹
損壞檢測等元件檢測
目前,結合深度學習等人工智慧的3D技術 受到了越來越多應用的青睞。這種技術交互使得物體識別以及精確確定物體在空間中的位置變得更輕鬆。因此,機器人現在能夠抓取以前無法抓取的物體。同步定位和映射(SLAM)系統使用視覺晶元來創建高解析度的三維地圖,適用於自動駕駛汽車和增強現實應用。
我們的 3D 產品
在這裡為 3D 視覺系統找到合適的軟硬體


