Baslerステレオカメラ
産業用ロボットによる3D画像処理に最適
直感操作のBaslerアプリケーションソフトウェアやサードパーティソフトウェアを活用し、高画質・低レイテンシー・シンプルなシステム設計を実現。物流、ファクトリーオートメーション、ロボットによるピックアンドプレースをはじめ、幅広い作業を強力にサポートします。
プラグアンドプレイ対応
オンボード処理、直感操作のオンラインプラットフォーム、各種業界規格準拠によりスムーズな運用が可能産業グレードの耐久性
産業用途の過酷な環境でも優れた性能を発揮充実のソフトウェア
用途に応じて選べるモジュラー構造のソフトウェアをご提供低コスト
ハードウェアとソフトウェアを自由に組み合わせることでシステム全体のコストを削減
ステレオカメラ
カメラの選定やシステム構築には、ビジョンシステムコンフィギュレーターが便利です。
Baslerステレオカメラについて
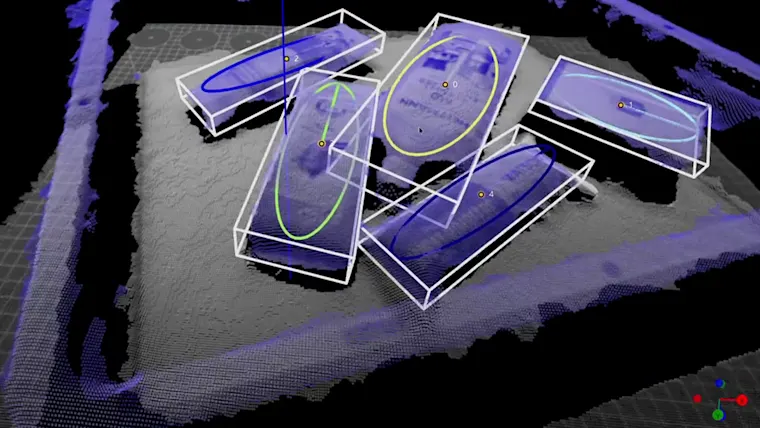
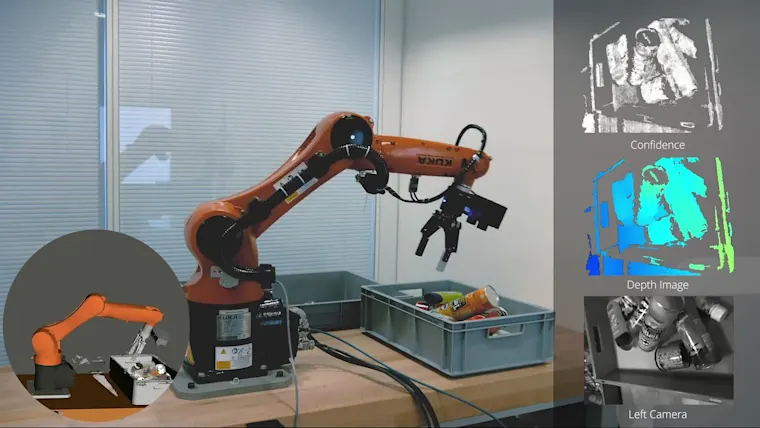
物流、ファクトリーオートメーションなどにおける各種表面形状・質感の3D撮影に対応したStereo aceと、プリインストール済みのソフトウェアにより、ロボットアームによる高精度な物体認識やピッキングを可能するStereo visardの2種類の製品シリーズをご用意しています。

Stereo mini
お手頃価格の小型ステレオカメラとしてロボット・物流用途におすすめ
基線長50mm/95mmに対応し、近距離から中距離の測定に最適
各種インターフェース(USB 3.0、GigE、GMSL)を選択可能
pylon SDKとGenTLを介して簡単セットアップ
工場出荷時のキャリブレーションにより、優れた深度精度を確保
レイテンシーを抑えたリアルタイムな測定を実現
機械やロボットに取り付けられるコンパクトかつ丈夫な筐体を採用

Stereo ace
基線長100mm/200mm/300mm、モノクロ/カラーを選択可能
pylon SDKによるスムーズなセットアップを実現
Baslerロボット向けアプリケーションソフトウェア、Basler 3D Camera Cube I/Sに対応
工場出荷時の事前キャリブレーション、動的セルフキャリブレーションにより安定した3Dデータを生成
レイテンシーを最小限に抑えた高速3D撮影&短いサイクルタイム
要件に応じてハードウェアのカスタマイズも可能

Stereo visard
基線長65mm/160mm、モノクロ/カラーを選択可能
スマートなオンボード処理&プロジェクター付属(オプション)
Baslerロボット向けアプリケーションソフトウェアに対応
レイテンシーを最小限に抑えた高速3D撮影&短いサイクルタイム
簡単便利なオンラインプラットフォームにより設定や運用をサポート
Baslerロボット向けアプリケーションソフトウェア

ビンピッキング、マシンテンディング、オーダーピッキングをはじめ、さまざまなロボット作業に対応したソフトウェアモジュールを豊富に取り揃えています。いずれのソフトウェアモジュールも、各種インターフェースを介してBaslerステレオカメラと簡単に接続できます。また、用途に応じて照明やプロジェクターを追加することも可能です。
アプリケーションソフトウェアの詳細はこちらBaslerステレオカメラの詳細について
Baslerでは、製品の仕様や用途などについて詳しく解説した資料を多数公開しています。ぜひご覧ください。