Time-of-Flightとステレオビジョンの比較
2D画像より情報量が多いことから、ファクトリーオートメーション、ロボット、物流、医療などさまざまな分野に活用されている3D画像。その代表的な撮影手法にはTime-of-Flightとステレオビジョンの2種類がありますが、それぞれどのような違いがあるのでしょうか。以下で詳しく比較しながら、解説していきます。
読了時間:約 9 分

物流、ロボット工学、医療におけるTime-of-Flightカメラの活用事例
このホワイトペーパーでは、Time-of-Flightカメラの活用事例について、以下のトピックを中心に解説します。
各種3D技術の違い
ToFカメラの特長
物流、ロボット工学、医療におけるToFカメラの活用事例
3D撮影による奥行き情報の取得
3次元の物体を2次元へ平面化する2D撮影では、奥行き情報が得られないため、撮影角度によっては、本来の形状が正しく表示されないおそれがあります。しかし、2D撮影の目的は、色・構造の解析、部品の識別、過不足の確認、キズ・不良の検出、文字認識、方向検知などが中心であるため、そもそも形状や奥行きに関する情報が必要なく、十分なコントラストを確保できる照明さえあれば問題ありません。
一方、奥行き情報を取得する3D撮影では、容積・形状・距離・方向を検出したり、空間的な位置関係から過不足を確認したりすることができますが、撮影手法の違いによっては、周囲の明るさや対象物の表面特性を考慮しなければなりません。2D撮影と3D撮影に適した用途について、詳細を以下の表にまとめました。
2D撮影と3D撮影の用途比較
用途 | 2Dカメラ一覧へ | 3D製品 |
|---|---|---|
容積・形状の分析 | + | - |
色・構造の認識 | + | - |
高コントラスト撮影 | + | - |
低コントラスト撮影 | - | + |
高低差の検出 | - | + |
3次元空間における位置特定・検査 | - | + |
文字・バーコードの認識 | + | - |
部品の識別 | + | + |
過不足の確認 | + | + |
キズの検出 | + | + |
3D撮影手法
ここからは、3D撮影手法であるTime-of-Flightとステレオビジョンの特性やメリット・デメリットについて見ていきます。

Time-of-Flight
カメラに内蔵した光源から対象物に向かって光パルスを照射し、その光が反射して戻ってくるまでの時間を測定することで、画素間の距離や奥行きに関する情報を取得する撮影手法です。撮影時にはレンジマップ、ポイントクラウド、各数値の信頼性を表す信頼性マップのほか、2Dの輝度画像(モノクロ濃淡画像)も生成されます。
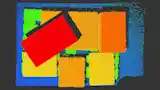
角やエッジのない対象物でも色や明るさに左右されることなく、簡単に背景と分離できるほか、動体撮影に対応し、最大900万個の測定点をmm単位の精度で測定できることもTime-of-Flightの大きな特長です 。しかも、Time-of-Flightカメラ は、他の3Dカメラより安価かつ省スペースでシンプルな構造になっており、設置やセットアップも簡単です。

ただし、正確な測定を行うには、周辺環境と撮影距離に一定の配慮をしなければなりません。例えば、対象物に角や凹凸があると、乱反射が発生して測距精度が低下してしまいますし、カメラの近くに反射性の高い物があると、迷光により不具合につながります。逆に対象物の反射性が低過ぎても、距離測定に必要な光量が確保できません。また、Time-of-Flightは基本的に中距離撮影に適した手法であるため、短距離撮影にはおすすめできません。

ステレオビジョン
人間の目と同じ原理を利用した手法で、2台の2Dカメラで異なる角度から対象物を撮影することで、奥行き情報を取得します。3Dデータの生成には、2台のカメラ の位置情報(外部パラメーター)のほか、レンズの光学中心、焦点距離などの内部パラメーターも必要になり、これらを組み合わせながら、カメラごとにキャリブレーション値を決定します。一方、奥行き情報の計算では、2枚の2D画像を補正した後、専用のアルゴリズムにより画像間の対応点を探索します。そして、これに先ほどのキャリブレーショ値を掛け合わせることで、対象物や背景のポイントクラウドが生成されます。なお、ステレオビジョンの撮影距離は、2台のカメラの位置関係や角度によって変わります。
Time-of-Flightと異なり、2D撮影に求められる最低限の明るさがあれば、ステレオビジョンにレーザーなどの照明は必要ありません。そのため、周囲が明るい、測定範囲が重なっている、対象物の反射性が高いなど、照明の使用が難しい場合は、ステレオビジョンを選択するとよいでしょう。
ただし、2枚の画像を比較して3Dデータを生成することから、小さな対象物に対してステレオビジョンを使用する場合は、ランダムパターンのプロジェクターを追加するなど、照明で表面構造を強調する必要があります。
構造化光
ステレオビジョンに似ていますが、こちらは2Dカメラとストライプパターンのプロジェクターを使用する撮影手法です。正弦波状の光を照射し、対象物の表面に人工的な模様を浮かび上がらせた後、その歪みから奥行き情報を計算し、正確な3Dデータを生成します。
近距離撮影向けの高精度センサーを使用し、複数の画像を連続して処理するため、CPU負荷が大きく、動体撮影に向いていないなど、コストや速度を重視しない限られた用途にのみ適しています。
メリット&デメリット
Time-of-Flight | ステレオビジョン | 構造化光 | |
|---|---|---|---|
範囲 | + | o | o |
精度 | o | + | + |
低照度撮影 | + | o | + |
高照度撮影 | + | + | - |
平面撮影 | + | - | + |
動体撮影 | o | + | - |
カメラの大きさ | + | o | - |
導入コスト | + | o | - |
撮影手法別のおすすめ用途
Time-of-Flightの主な用途
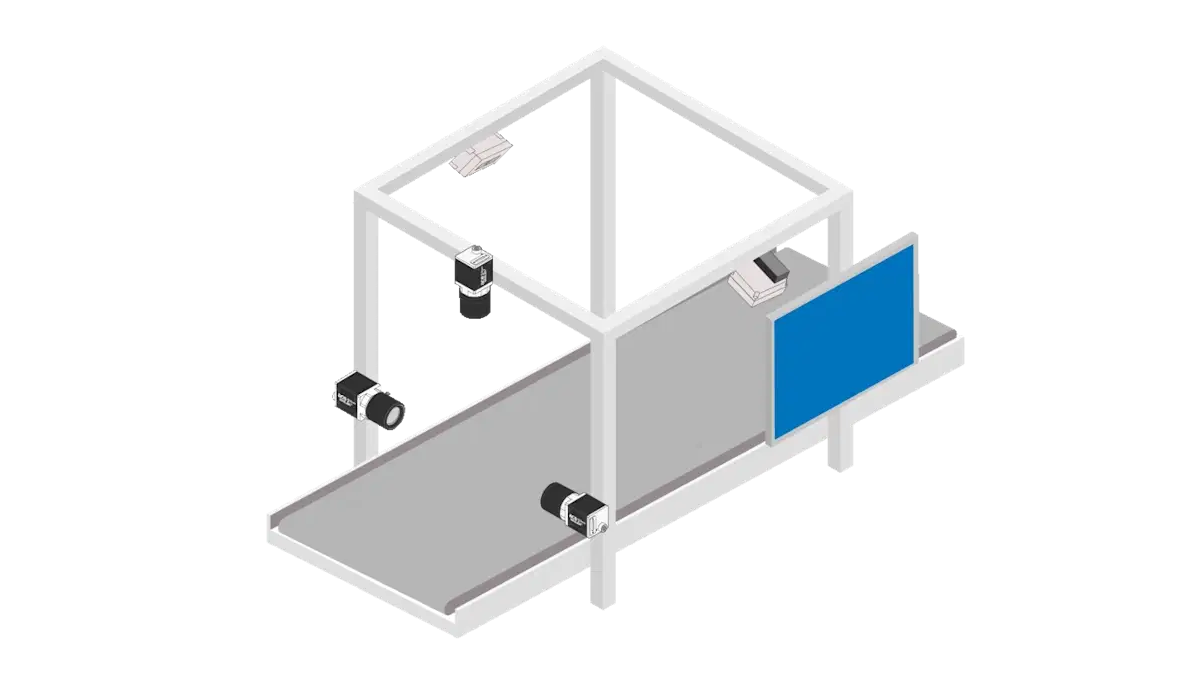
システム構成をシンプルに抑えながら、離れた位置から広範囲を高速・高精度で測定したい場合におすすめです。
物体測定:容積、形状、位置、方向
ファクトリーオートメーション:位置特定、ピッキング、組み立て、キズ・積層欠陥の検知
ロボット:グリップ位置の特定、ベルトコンベヤー上のピッキング作業、ビンピッキング、ピックアンドプレース
物流:梱包、スタッキング、パレット積み降ろし、ラベル貼付、無人搬送車(ナビゲーション、アラーム)
医療:患者のポジションニング・モニタリング
ステレオビジョン&構造化光の主な用途
構造化光を中心にいずれの手法も測定精度が高く、凹凸のある小さな対象物の撮影におすすめです。
位置・方向の特定
高精度な物体測定:容積、形状、位置、方向
ロボット:ビンピッキング、ナビゲーション、衝突防止、ピックアンドプレース
物流:車両の屋内ナビゲーション、機械の積み降ろし、パレット積み降ろし
屋外撮影:樹木の測定・検査
部品検査(キズの検知など)
ロボットにより初見の対象物のグリップ位置を特定したり、自己位置推定と環境地図作成を同時に行うSLAMシステムにビジョンセンサーを搭載することで、自動運転車や拡張現実に使用する高解像度の3Dマップを作成したりするなど、今や多くの業界に3D製品 が導入されています。ディープラーニングを行う人工知能との技術的な融合を含め、今後も物体認識や位置特定のための3D技術はますます進化していくことでしょう。
3D製品について
3Dビジョンシステムに最適な製品の一覧


