Basler ToF Software
Für Ihren reibungslosen Einstieg in die 3D-Bildgebung: Die Basler pylon Software und das pylon Supplementary Package enthalten alle notwendigen Tools für die einfache Inbetriebnahme und Integration Ihrer Basler ToF Camera.

Umfang des pylon Supplementary Package
Basler blaze Viewer
Basler GenTL Producer
Beispiel-Programme
Kompatibilität zu GenICam- GenTL und GenAPI-Standards ermöglicht Plug-and-play-Integration in populäre Bibliotheken wie HALCON, Isaac, MIL, OpenCV, Point Cloud Library (PCL), ROS
Verfügbar für Windows und Linux (x86_64, ARM)

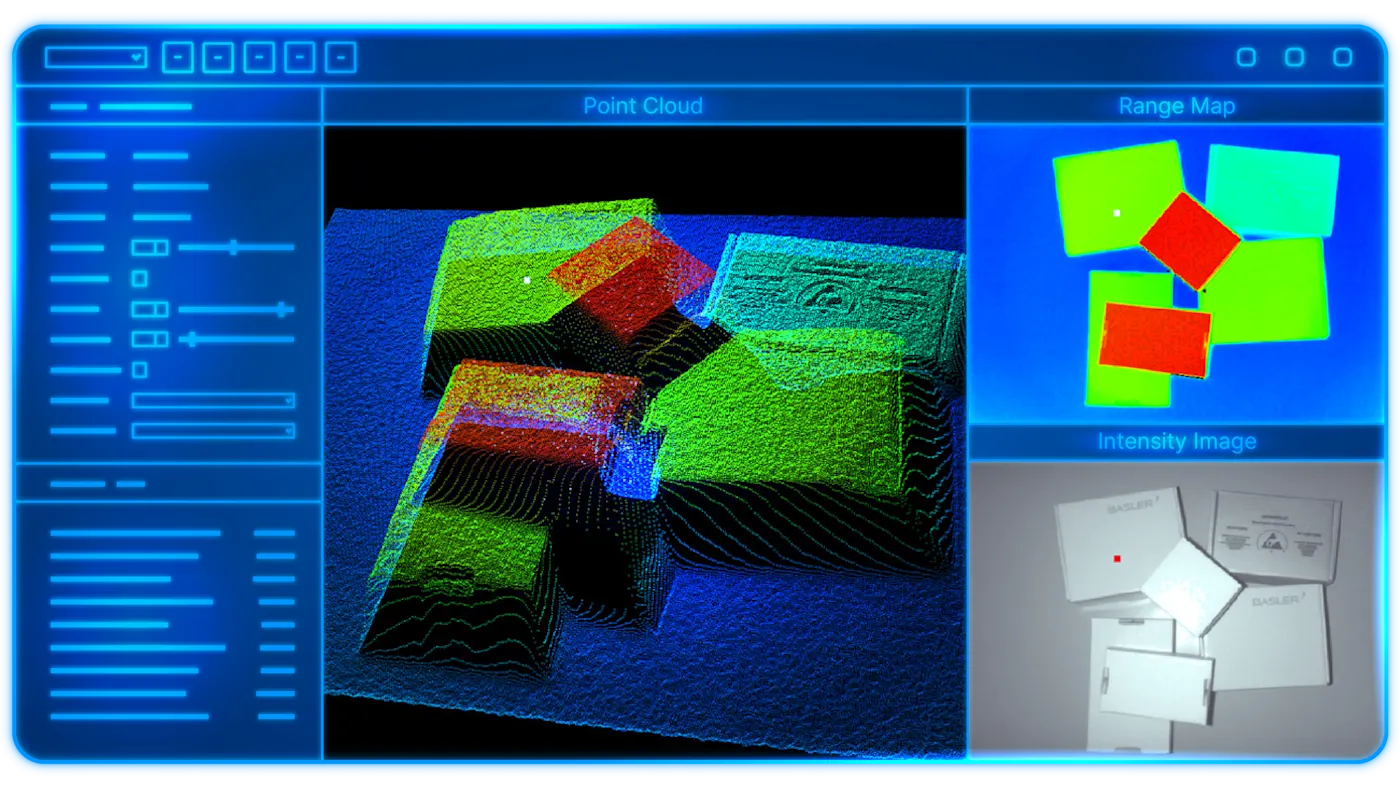
Alles im Blick mit dem blaze Viewer
Das pylon Supplementary Package für die Basler ToF Camera enthält den benutzerfreundlichen blaze Viewer. Mit diesem leistungsstarken Konfigurations- und Visualisierungstool können Sie auf alle Kamera-Parameter einfach zugreifen. In mehreren Fenstern werden zeitgleich die Tiefendaten und Intensitätsbilder dargestellt.
Zugriff auf alle Kamerafunktionen über GenAPI-Funktionsbaum
Detaillierte Beschreibung jedes Parameters
Visualisierung von Intensitätsbild, Punktwolkenbild, Range Map, Confidence Map
Kopieren und Einfügen von Code-Schnipseln direkt in Ihren Quellcode
Einfaches Abspeichern von Bildformaten und Einstellungen
pylon Kamera-Treiber für das Robot Operating System (ROS)
Die Programmierung von Robotern mit Vision Komponenten erhält mit der Integration der Basler ToF Camera eine neue Dimension. Die Time-of-Flight-Kamera bietet kosteneffiziente 3D-Bildgebung in Echtzeit und kann jetzt über den pylon Kamera-Treiber für die vollständig überarbeitete Version des Robot Operating Systems (ROS 1 und 2) eingesetzt werden.

Code-Beispiele für Ihren Schnellstart mit der ToF Camera
Die im Supplementary Package enthaltene umfangreiche Sammlung von Code-Beispielen macht es einfach, sich mit den Kamerafunktionen und API vertraut zu machen. Anhand zahlreicher Use Cases ist anschaulich illustriert, wie Sie die 3D ToF Camera in Ihre Anwendung integrieren können.
Code-Beispiele sind verfügbar in C++, C# und Python.