Basler Stereokameras
3D-Stereokamera für bildgeführte Robotik-Anwendungen
Basler Stereokameras sind ideal für Pick-and-Place-Aufgaben aus dem Bereich Robotik, Logistik und Fabrikautomation. Sie überzeugen durch hervorragende Bildqualität, geringe Latenzzeit und einfache Inbetriebnahme dank intuitiver Software. Kompatibilität mit Basler 3D Applikation- & Drittanbieter-Software bietet viele Einsatzmöglichkeiten.
Plug-and-play
Einfache Integration dank intuitiver Software und zahlreicher SchnittstellenIndustrietauglichkeit
Robustes Design entwickelt für Höchstleistung in anspruchsvollen industriellen UmgebungenFlexible Software Suite
Intelligente 3D-Software-Module für individuelle bildgesteuerte Robotik-AnwendungenKosteneffizienz
Optimierte Gesamtsystemkosten dank flexiblem Hardware- und Softwarekonzept
Unsere Stereo Kameras
Finden Sie die passende Kamera für Ihre Anwendung oder nutzen Sie unseren Vision System Configurator, um Ihr System zu konfigurieren.

Unsere Stereokamera Produktfamilien
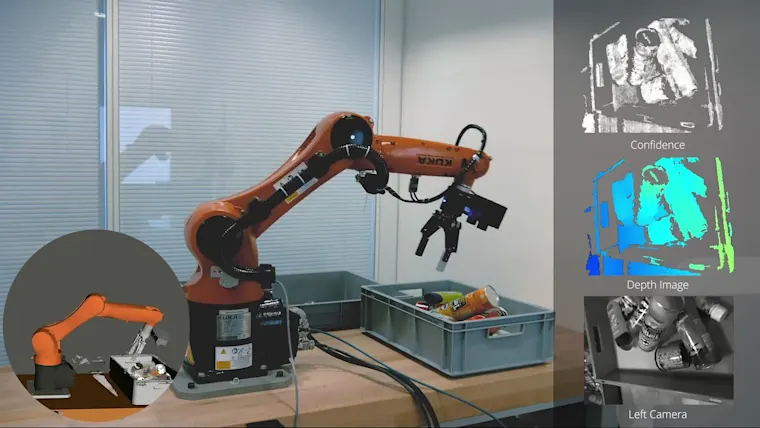
Die Stereo ace Kameras liefern hochaufgelöste 3D-Bilddaten für Logistik und Fabrikautomation, auch bei schwierigen Oberflächen. Die Stereo visard Kameras sind hingegen für bildgeführte Robotik optimiert. Mit vorinstallierter Software sind sie besonders gut geeignet für Anwendungen der Objekterkennung und erlauben so z. B. einem Roboterarm den gezielten Griff.

Stereo mini
Kompakte, kosteneffiziente Stereokamera für Robotik und Logistik
Basisabstände von 50 und 95 mm für kurze bis mittlere Tiefenbereiche
USB 3.0-, GigE- oder GMSL-Schnittstellen je nach Modell
Einfache Integration über pylon SDK und GenTL
Werkseitig kalibrierte Stereogeometrie für zuverlässige Tiefendaten
Geringe Latenz für Echtzeitanwendungen
Kleines, robustes Gehäuse für Maschinen- und Roboterintegration

Stereo ace
Basisbreiten von 100, 200 und 300 mm in Farb- und Schwarzweiß-Optionen
Schnelle und einfache Integration dank pylon SDK
Umfangreiche Auswahl an Basler 3D-Anwendungssoftware mit Basler 3D Camera Cube I oder S
Werkskalibrierung und dynamische Selbstkalibrierungsroutinen für stabile Stereobilder im Feld
Minimale Latenzzeit für schnelle 3D-Bilderfassung und niedrigste Zykluszeiten
Anpassbare Hardware für eine ideale Kundenlösung

Stereo visard
Basisabstände von 65 und 160 mm in Farb- und Schwarzweiß-Optionen
Intelligentes Kameralösung dank direkter Onboard-Verarbeitung mit optionalem Projektor
Umfangreiche Auswahl an Basler 3D-Anwendungssoftware
Minimale Latenzzeit für schnelle 3D-Bilderfassung und niedrige Zykluszeiten
Einfach zu konfigurieren und zu bedienen dank benutzerfreundlicher Weboberfläche
Basler Application Software for Robotics

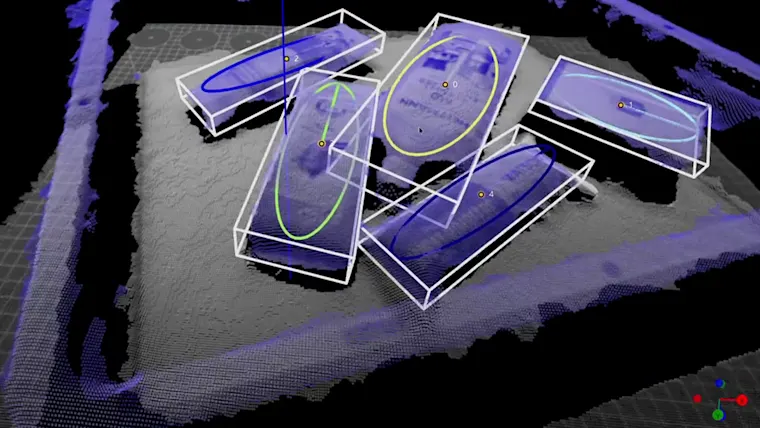
Eine umfangreiche Auswahl an anwendungsspezifischen 3D-Software-Modulen liefert Lösungen für typische Robotikaufgaben wie Bin Picking, Maschinenbestückung oder Kommissionierung. Die Module lassen sich einfach auf den Basler Stereo Cameras aktivieren und intuitiv über die Standardschnittstelle des Sensors bedienen. Optionale Hardware-Ergänzungen wie Projektoren oder Beleuchtung optimieren den Betrieb zusätzlich.
Application Software for RoboticsWeitere Informationen zur Basler Stereo Camera
Erfahren Sie mehr über unsere Produkte und ihre Anwendungen. Unser umfangreiches Informationsmaterial bietet Ihnen alle wichtigen Details.