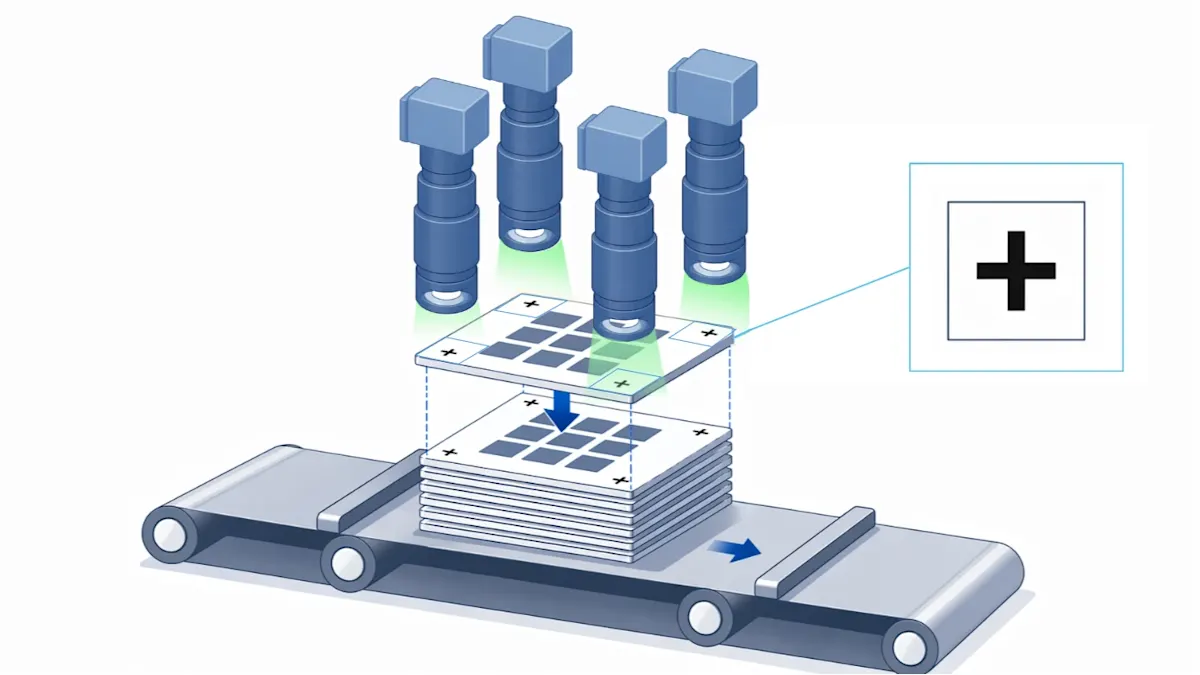
車用多層陶瓷電容堆疊的高速對位
高層數 MLCC 堆疊的穩定對焦控制
車用 MLCC 須能承受熱膨脹 (CTE) 與機械應力,因此外部公差須極為嚴格、內部電極對位也須一致。當層數從數百層增加到約 1,000 層時,檢測系統必須維持無失真成像,同時持續因應變動的對焦條件。穩定且清晰對焦的對位標記影像至關重要;任何失焦都會直接影響 ΔX、ΔY、Δθ 的偵測精度與整體良率。
車用 MLCC 堆疊檢測的光學需求
車用 MLCC 堆疊須兼具極低失真與穩定的動態對焦成像,才能在堆疊高度持續增加時,仍維持對位的可靠性。
微米級的對位偏差,會在熱膨脹過程中造成內部應力分佈不均,使電極與邊緣之間的安全裕度縮小,並提高出現裂痕或短路的風險。為確保長期可靠性,檢測系統必須在不同堆疊高度下,皆能維持穩定的成像與精準的對位偵測。
要滿足這些需求,兩項光學能力不可或缺:無失真成像與動態對焦控制。

嚴格公差下的尺寸精度
車用 MLCC 須具備嚴格的外部公差與一致的內部對位,才能在熱膨脹時安全運作。
標準鏡頭會在物件高度改變時產生透視失真;因此對位標記會在不同層之間呈現不同的放大率,使邊緣位置偏移,並讓計算出的中心座標 (ΔX、ΔY) 出現偏差。這類細微的對位誤差會逐層累積,使整體堆疊精度下降。
遠心鏡頭 可消除透視失真,確保 整個堆疊高度的量測都一致且精準。若搭配液態鏡頭等動態對焦元件,因光學功率改變,可能會出現輕微的放大率變動 。實務上,這種變動通常幅度小且可預期,可透過適當的鏡頭選擇與系統層級的驗證來加以管控。
高層數下的穩定對焦
隨著堆疊持續增加,對焦平面會超出有限景深的範圍而不斷偏移。
若沒有動態對焦調整,不同高度的對位標記將無法持續維持清晰對焦,導致邊緣清晰度起伏,中心點偵測的穩定性也會降低。
機械式重新對焦會帶來額外挑戰,包括振動、安定時間以及有限的反應速度,這些都會影響對位精度與整體循環時間。
液態鏡頭自動對焦可即時 進行非機械式的快速對焦調整,維持影像銳利度無延遲,在支援高速堆疊製程的同時,也確保各層的對位基準保持穩定。
用於 MLCC 堆疊對位的整合式液態鏡頭自動對焦方案
為滿足這些需求,自動對焦必須是視覺系統的一部分,而非外掛的附加元件。

選擇正確的光學組合是第一步。在堆疊高度變化顯著的 MLCC 堆疊應用中,工程師必須在遠心成像的穩定性與動態對焦調整之間取得平衡。Basler 協助客戶選擇最佳的遠心鏡頭與液態鏡頭搭配,在所需的對焦範圍內帶來可靠的對位表現。
整合鏡頭控制以降低佈線與整合複雜度。傳統做法是由工業電腦驅動液態鏡頭,這會增加佈線複雜度,控制鏡頭的責任也會落在系統工程師身上。我們的成像方案直接整合了液態鏡頭控制功能,簡化整體系統架構。
預載自動對焦演算法,實作封閉迴路、即時對焦的影像輸出。自動對焦演算法直接在成像模組內的 FPGA 上執行;對焦調整以封閉迴路方式運作,並與影像擷取緊密同步,每一次檢測循環都能輸出對位標記清晰一致的影像,無延遲,亦無機械安定耗時。
從第 1 層到第 1,000 層的可靠對位
整個堆疊高度皆能穩定對焦:層數增加時影像銳利度仍維持一致,且不會產生機械運動或振動所引發的誤差。
可靠的對位偵測:一致的成像可支援精準對位,並具有與影像擷取同步的確定性對焦回應。
更高的吞吐量:消除機械安定延遲,加快堆疊循環。
簡化整合:毋需外部鏡頭控制器、元件數量更少,系統複雜度也隨之降低。
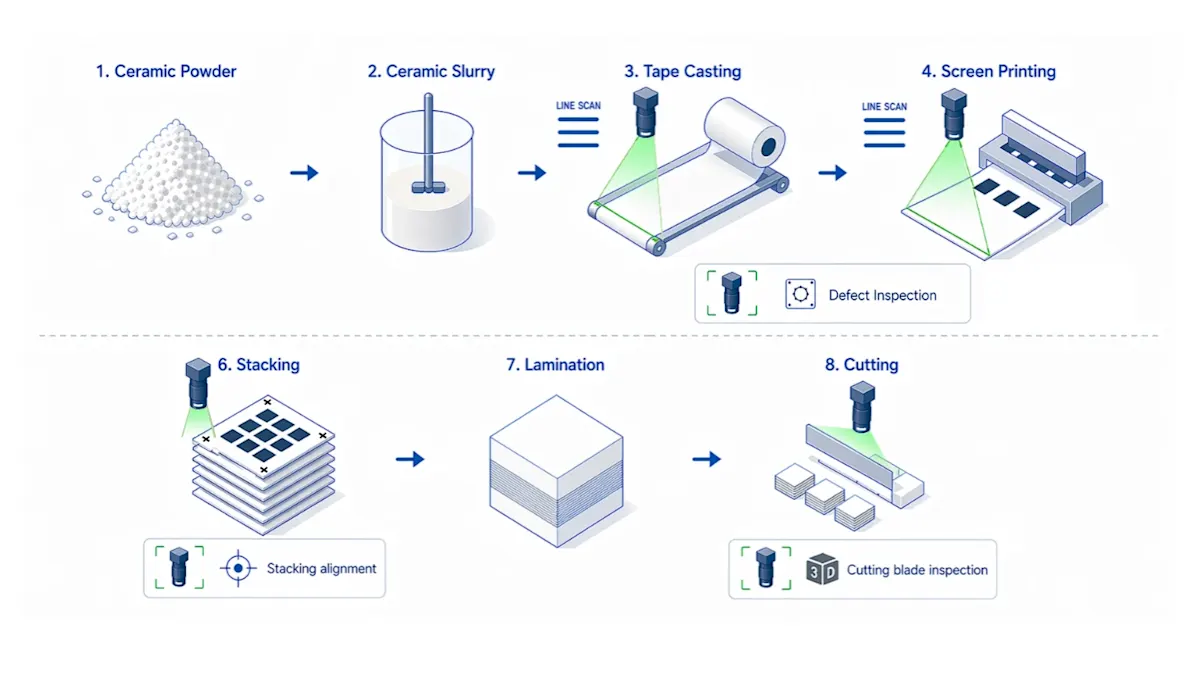
在車用 MLCC 堆疊中,用於堆疊的陶瓷層在物理厚度上較厚,且層數正從數百層增加到約 1,000 層,目的是要在 0603 甚至 0402 這類極小封裝中達成更高的電容值。隨著層數持續增加,傳統光學要維持足夠的景深愈來愈具挑戰,因此液態鏡頭自動對焦成為堆疊過程中穩定對焦的關鍵。
堆疊前的陶瓷層檢測
在進行堆疊之前,必須檢測陶瓷生胚層的表面缺陷、汙染或列印不一致;這些瑕疵都可能延伸到最終的 MLCC 結構中。這類檢測通常採用高速線掃描系統,可在大面積範圍內進行連續成像,於整個寬度上維持一致的解析度與穩定的影像品質。
深入了解用於高速陶瓷層檢測的線掃描相機切割刀刃缺角檢測
在堆疊與層壓之後,另一個關鍵的檢測點在於切割製程。即使是刀刃邊緣的微觀缺角,若未被發現,都可能影響數千個元件。可靠的檢測需要在高速掃描時具備精準的對焦控制,通常需仰賴 3D 量測回饋,以維持刀刃邊緣的銳利成像。
深入了解我們用於 MLCC 切割刀刃檢測的 3D 解決方案