出貨物流流程為達有效包裝而採用的體積量測
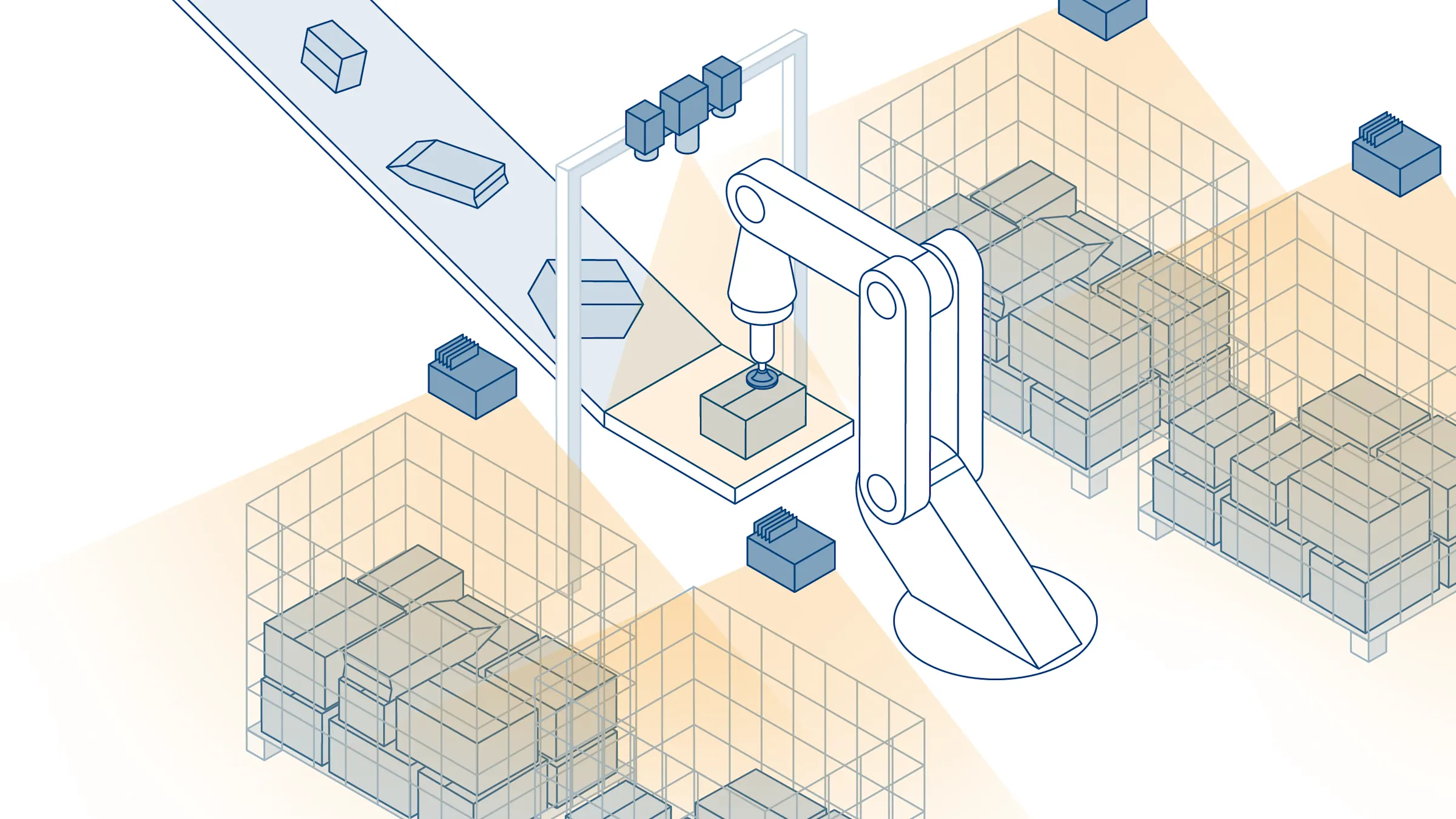
3D 相機可測量棧板貨籠的包裝和填裝水準
在出貨物流流程中,確保包裝棧板貨籠、棧板和其他裝載載具的安全性與有效性,是十分重要的。精確記錄包裹和貨物的體積,有助於讓可用裝載空間最佳化,並確保配送的順利。雙目視覺相機和時差測距相機技術可以精確測量包裹、檢測棧板貨籠中的縫隙,從而達成最佳化包裝。機器人可自動執行所有製程步驟。
包裝流程的基礎 - 根據郵遞區號進行分類
進入配送最後一哩的包裹和貨物,必須按照目的地區域來分類。此資訊包含在郵遞區號中,而郵遞區號則包括在以數位方式建立的貨運標籤條碼和 QR 碼中。您可以透過我們的使用案例,了解哪一種影像處理系統可以同時讀取各種不同的一維和二維條碼,並啟用光學文字辨識 (OCR) :
使用案例「機器視覺可讀取任何方向的代碼和文字」雙目視覺可達成最高精確度,時差測距技術則可提高效率
完成目的地區域辨識的包裹,會傳送到一個儲存平台上。在此使用雙目視覺技術來進行測量和定位。物流機器人拾取包裹後,另一台採用 ToF 技術的 3D 相機會根據其目的地區域,來確定要放入棧板貨籠中的適當位置。物流機器人可據以採用最佳方式來將貨物放入棧板貨籠內。
我們觀察到,倉儲和物流處理中仍有高比例的人工作業。現代化的影像處理解決方案,可將各領域中多種子步驟加以自動化。員工不但變得輕鬆,可以沿著流程鏈進行品質檢核。

運用雙目立體視覺,體積標定可精確到毫米等級
在 150 公分的距離下,3D stereo ace 相機能夠 STA-200-547M-082616-W 感光元件 安裝在儲存區上方。該相機可進行包裝測量,並在下個步驟中,依據尺寸來確定包裹在棧板貨籠的適當位置。
結合處理 3D 資料的工業電腦,尺寸標定所需時間少於 200 毫秒。為了達到相對較短的處理時間,我們建議在計算架構中提供必要的 GPU 支援 。

藉由包裝表面的精確定位,達成無損傷的拾取
來自 stereo ace 相機的 3D 深度資料也可提供包裹的精確定位。與其他 3D 方法相比,立體視覺技術即使在表面變化的情況下,仍能最精確地偵測上緣。機器人應用軟體模組3D Boxpick+Match偵測包裹並確定精確的抓取點。這使機器人的真空夾具能安全且無損地抓取包裹。
可獲得最高邊緣偵測精確度的關鍵,在於已整合在 stereo ace 相機中的隨機點投影器:投影器會將隨機點狀圖案投影到拍攝場景,可在幾乎沒有結構的情況下創造出紋理。
有了最適切的 3D 相機技術,就可以控制機器人,讓包裹得到仔細且無損傷的處理。透過這種方式,配送中心可利用電腦視覺來提高準確度、生產力和效率,節省大量成本。

高效包裝:利用時差測距技術偵測充填水準
安裝在貨籠上方的 3D 時差測距相機,可即時測量貨籠內的剩餘空間。此資料會與剛取出的包裹尺寸進行比較,並為每個包裹尋找合適的空隙或最有效的包裹空間。由於此流程步驟所需的精確度較低,因此 Basler 102 nm ToF 相機可以使用更具成本效益的 3D 技術。
相容於常見機器人品牌
透過軟體介面,我們的視覺產品相容於多種機器人和夾具系統。我們的機器人專家很樂意為您的專案提供建議。

