Basler Robotics Application Software
Präzise 3D-Vision Software für Roboter-Anwendungen
Die Plug-and-play-Software-Module eignen sich für typische Robotik-Applikationen wie Objekterkennung, Picking-Aufgaben und Navigation. In Kombination mit unseren Stereokameras wählen Sie genau die Module, die zu Ihren Anforderungen passen. Dank standardisierter Software-Schnittstellen lassen sie sich einfach in Ihre Roboter-Umgebung integrieren.
Plug-and-play
Einfach zu aktivierende Applikations-Module sowie Software-Schnittstellen für die Roboter-IntegrationFür typische Robotik-Anwendungen
Anwendungsbezogene Module für typische Robotik-Aufgaben zur effizienten Automatisierung und präzisen SteuerungWeb-basiertes User Interface
Intuitive Web-Konfiguration der Module und Echtzeit-Vorschau der erkannten Objekte mit den jeweiligen GreifpunktenReduzierte Systemkosten
Einzeln wählbare Module statt Komplettpaket vermeiden unnötige Kosten
Typische Einsatzbereiche der Application Software
Ob zur Optimierung von Sortier- und Kommissionierungsvorgängen oder Messkontrollen zur optimalen Steuerung des Roboters: Unsere Vision Lösungen bieten vielfältigste Einsatzmöglichkeiten für Ihre Roboter-Anwendung.





Pick-and-Place-Roboter-Steuerung: Software-Module und 3D-Kameras als Dreamteam
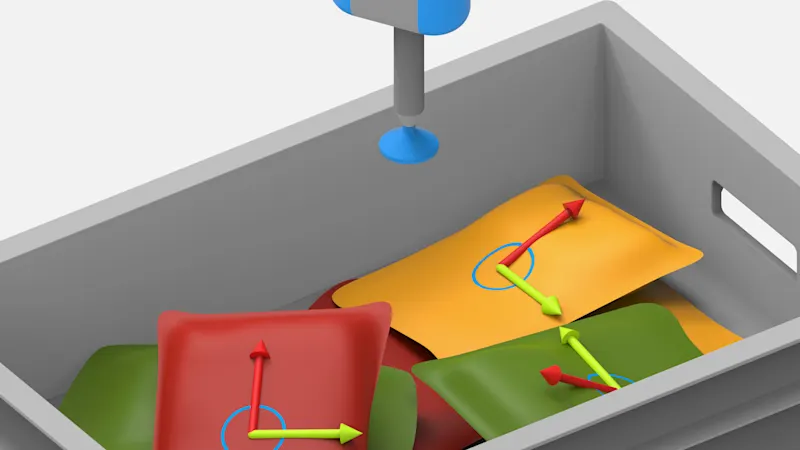
Unsere leistungsstarken 3D-Software-Module in Kombination mit präzisen Basler Stereokameras ermöglichen zuverlässige Pick-and-Place-Anwendungen – selbst in komplexen Umgebungen. Wir bieten eine flexible Lösung für unterschiedlichste Einsatzbereiche - vom „Griff in die Kiste“ bis zur präzisen Positionierung auf Förderbändern. Robuste Objekterkennung, Tiefeninformationen mit bis zu < 1 mm Genauigkeit und die einfache Integration in bestehende Automatisierungssysteme machen es möglich.
Zu den Stereokamera ModellenRoboter-Integration

Wir bieten verschiedene Lösungen an, damit Sie unsere 3D-Kameras und Software-Module einfach mit Ihren bevorzugten Robotern verwenden können. Unsere Produkte sind dank Software-Schnittstellen unter anderem kompatibel mit Robotern von ABB, Fanuc, KUKA, Universal Robots, Yaskawa, Techman Robot, fruitcore robotics und Franka Robotics.
Ihr Roboter ist nicht aufgelistet? Wir finden eine Möglichkeit und unterstützen Sie!
Kontaktieren Sie unsSoftware-Module für Robotik-Aufgaben
Zugeschnitten auf typische Robotik-Anwendungen umfasst die 3D Application Software Suite verschiedene Module für Aufgaben wie Objekterkennung und -identifizierung, Picking, Navigation und CAD-Abgleich. Die einzelnen Module sind so konzipiert, dass sie die jeweils individuellen Anforderungen dieser Aufgaben berücksichtigen. Die Software-Module sind kompatibel mit allen Basler Stereo Camera-Modellen. Zusätzlich können, in Kombination mit dem Basler Cube, die Picking-Module Basler 3D ItemPick und Basler 3D BoxPick auch mit der Basler ToF Camera eingesetzt werden. Wählen Sie aus der Software Suite das für Ihre Roboterlösung passende Modul aus und halten Sie so Ihre Gesamtsystemkosten niedrig.
Weitere Informationen zur Application Software for Robotics
Erfahren Sie mehr über unsere Produkte und ihre Anwendungen. Unser umfangreiches Informationsmaterial bietet Ihnen alle wichtigen Details.