Telecamere su bracci robotici
La telecamera Stereo Visard per un'elaborazione delle immagini precisa e intelligente in ambienti dinamici
Le telecamere consentono ai robot di percepire l'ambiente circostante, riconoscere gli oggetti ed eseguire attività complesse. Per svolgere queste attività, le telecamere sui bracci robotici devono essere in grado di compensare le vibrazioni, elaborare i dati delle immagini in tempo reale e offrire una perfetta integrazione. Ciò richiede telecamere speciali progettate per superare queste sfide.
Applicazioni tipiche per telecamere montate su bracci robotici
Grazie alla sua resistenza alle vibrazioni e al design compatto, la telecamera Stereo Visard è ideale per l'uso industriale su bracci robotici e in ambienti dinamici.

L'assemblaggio su braccio delle telecamere industriali consente di realizzare celle robotizzate compatte e flessibili. Con il braccio robotico, la posizione di ripresa della telecamera può essere variata liberamente. Ciò consente di osservare gli oggetti con precisione da diverse direzioni e a distanza ravvicinata.

Le nostre telecamere stereo 3D di livello industriale per applicazioni robotiche
La telecamera per i migliori risultati su un braccio robotico
Sebbene ci siano enormi vantaggi nell'avere una telecamera su un braccio robotico, ci sono alcune sfide che devono essere considerate. La telecamera Stereo visard è stata sviluppata appositamente per soddisfare questi requisiti.

Resiste a vibrazioni, urti e schizzi
I bracci robotici generano vibrazioni che possono portare a immagini sfocate. La nostra telecamera Stereo Visard convince con una stabilità meccanica sufficiente per evitare questi problemi e tiene conto anche delle condizioni difficili che si trovano negli ambienti di produzione:
Resistente alle vibrazioni fino a 5 g e urti fino a 50 g
I connettori M12 garantiscono il collegamento sicuri dei cavi
A prova di schizzi, grazie a Grado di protezione IP54
Capacità in tempo reale per risultati affidabili
Per molte applicazioni, in particolare con movimenti rapidi del braccio robotico, è fondamentale che l'elaborazione delle immagini avvenga in tempo reale.
La telecamera Stereo Visard offre la lavorazione dei dati in tempo reale attraverso un sistema di elaborazione a bordo: I dati delle immagini vengono elaborati direttamente sulla telecamera e il sistema è in grado di reagire rapidamente. Non è necessario un computer esterno.

Prevenzione delle collisioni grazie al Collision Check
I bracci robotici devono spesso accontentarsi di uno spazio limitato ed eseguire movimenti rapidi in stretta successione. Questo può facilmente portare a collisioni e, nel peggiore dei casi, la telecamera può essere decalibrata. Grazie al Collision Check, la Stereo Visard funziona in modo affidabile, anche in spazi ristretti.
Le funzioni di Collision Checkdei moduli software 3D ItemPick, 3D BoxPick o 3D SilhouetteMatch impedisce alla pinza di entrare in collisione con altri oggetti.

Facile integrazione nell'applicazione robotica
L'integrazione della soluzione di visione nel controllore del robot è un fattore essenziale e decisivo per l'efficienza e l'affidabilità di un'applicazione robotica. Può essere integrata senza problemi nelle celle robotiche esistenti ed è compatibile con diversi sistemi di robot e pinze.
Con la sua interfaccia Ethernet, la telecamera Basler Stereo Visard garantisce una trasmissione dei dati stabile e veloce e consente una facile integrazione nei sistemi esistenti.
Interfacce software disponibili: Sono disponibili moduli di integrazione e programmi campione per molte marche di robot comuni, che possono essere utilizzati per integrare la soluzione di visione nel controllore del robot.
Ponte EKI per KUKA
URcap per Robot Universali
Interfaccia robot generica per ABB, FANUC,e Techman Robot.
Franka Robotics, Fruitcore Robotics, e Yaskawa seguiranno presto. Saremo lieti di fornirveli su richiesta.

Calibrazione precisa della telecamera e del braccio robotico
Lacalibrazione occhio-mano è necessario quando un sistema robotico utilizza una telecamera per rilevare oggetti e quindi interagisce con essi utilizzando una pinza o uno strumento. Dopotutto, il sistema deve sapere come tradurre le coordinate della telecamera'nelle coordinate del robot'.

Leggero e compatto
I bracci robotici hanno capacità limitate in termini di peso aggiuntivo.
Leggero: Peso ridotto a partire da 0,68 kg
Compatto: da 135 mm x 75 mm x 96 mm
Grazie a queste caratteristiche del prodotto, il carico aggiuntivo sul robot è ridotto al minimo ed è più facile integrare l'imaging.
Vantaggi della telecamera Stereo Visard per bracci robotici
La telecamera Stereo Visard è la soluzione perfetta per le applicazioni in cui i robot devono lavorare con un sistema di telecamere all'avanguardia. Offre:
&autonomanella lavorazione dei dati Capacità in tempo reale:
Grazie all'elaborazione integrata, la telecamera è in grado di elaborare i dati delle immagini senza risorse informatiche esterne per interagire rapidamente con il braccio robotico.
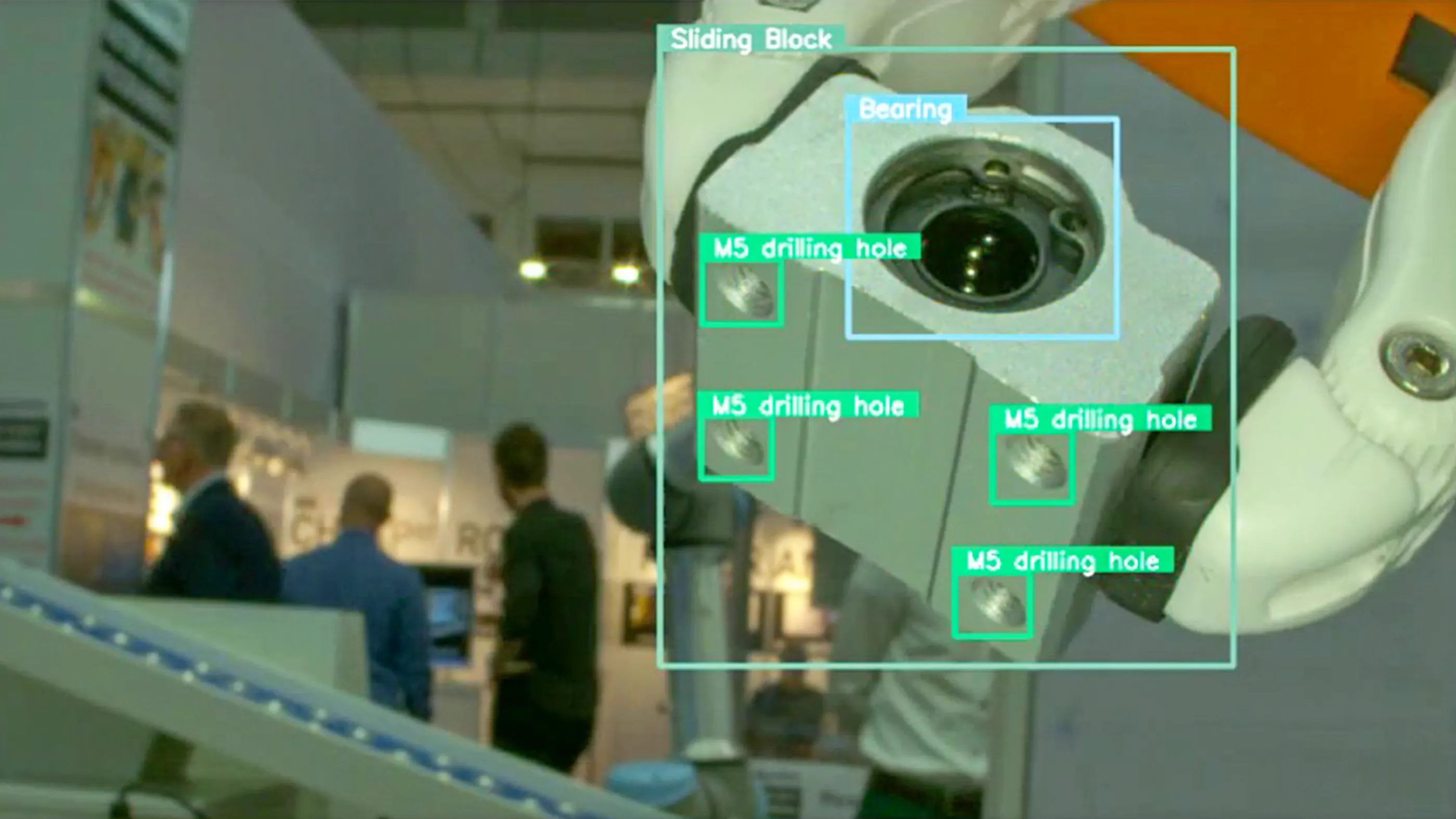
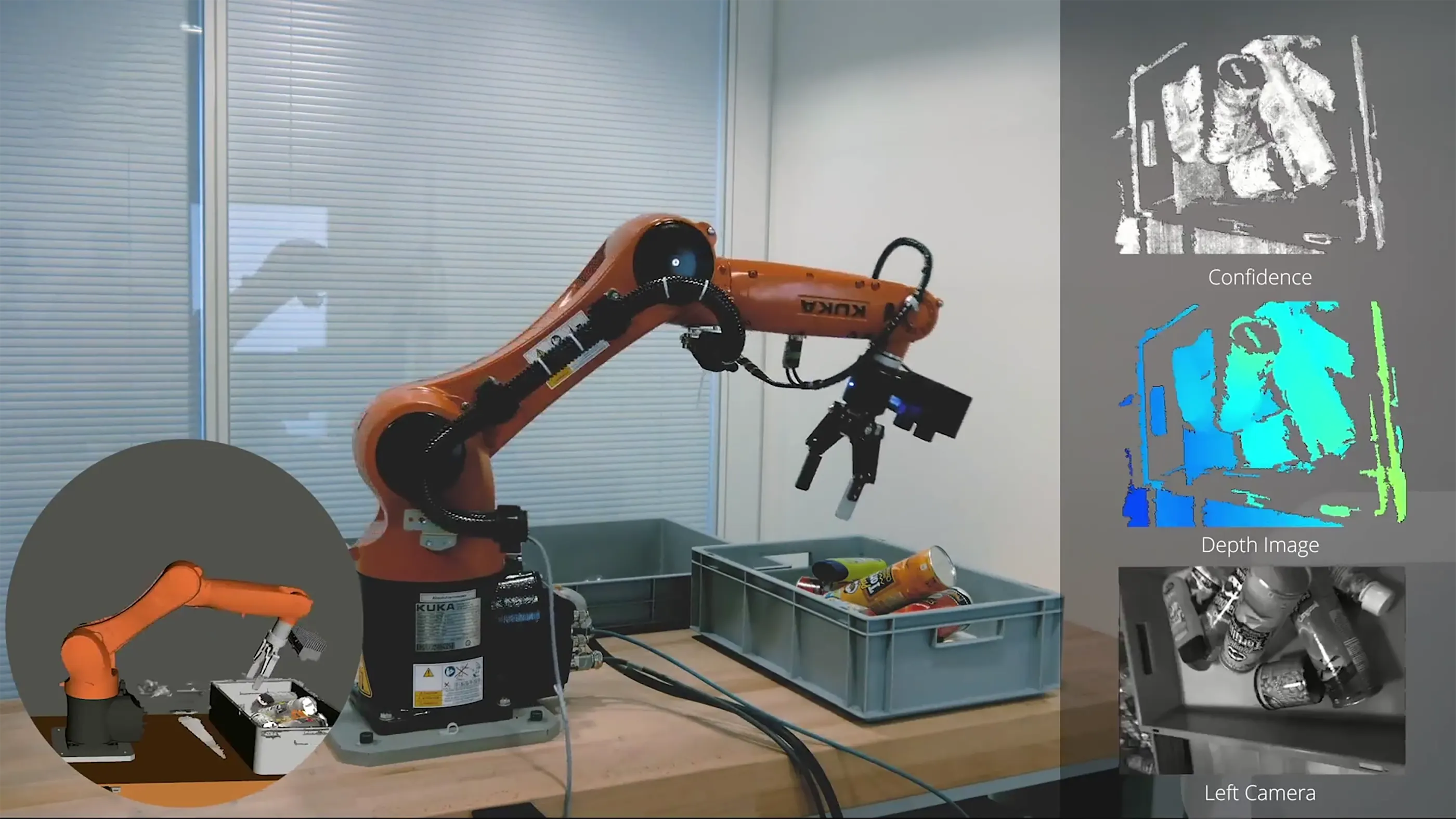
Acquisizione 3D precisa:
Ideale per applicazioni come il bin picking, rileva gli oggetti in 3D e ne calcola le posizioni esatte.
Design robusto:
Adatto per l'uso industriale e le applicazioni dinamiche, come i bracci robotici.
Integrazione semplice:
Grazie a una connessione Ethernet e a interfacce software, la telecamera può essere facilmente integrata nei sistemi robotici. La calibrazione occhio-mano è assicurata tramite l'interfaccia API REST e garantisce un facile adattamento al rispettivo sistema robotico.
Software applicativo Basler per la robotica

I singoli moduli software sono realizzati per le tipiche applicazioni robotiche come il riconoscimento di oggetti, le attività di prelievo e la navigazione. Possono essere attivati per la rispettiva applicazione tramite plug-and-play e gestiti in modo intuitivo, mantenendo bassi i costi complessivi del sistema.